
 Customer Portal
Customer Portal
How the R2Sonic family of multibeam echosounders helps users work with multiple acoustic devices
When the Sonic 2024 was introduced in 2009, it was the first multibeam echosounder in the world that allowed the user to adjust the operating frequency on the fly. The first systems provided the user with a frequency range from 200kHz to 400kHz, in 10kHz steps. The ability to change both the transmit and receive frequency was developed for multiple reasons, but the main reason was to allow the Sonic 2024 to work with other acoustic sensors.
Working with a single beam echosounder on board? A single beam echosounder, working on 200kHz, will interfere with a multibeam echosounder working at 400kHz because 400kHz is a harmonic of 200kHz. Adjusting the Sonic 2024 frequency to 330kHz would move the multibeam frequency far from a harmonic of 200kHz; the two acoustic sensors will not interfere with each other and can work together.
The Sonic 2022, Sonic 2024, and Sonic 2026 now have a frequency range from 170kHz to 450kHz (the Sonic 2020 200kHz to 450kHz), providing more frequencies that are available to avoid acoustic interference.
What happens when changing the frequency does not remove the multibeam from acoustic interference when using sensors like DVLs or SBPs with much stronger outputs over wider frequency ranges? R2Sonic solves the problem by providing the means to have the multibeam sonar either send a trigger pulse out or receive an external trigger itself.
Trigger In/Trigger Out
Triggering, either sending or receiving, is set up under Settings – Sensor Settings and uses two BNC connectors (labelled Sync In and Sync Out) on the SIM to send or receive a TTL pulse.
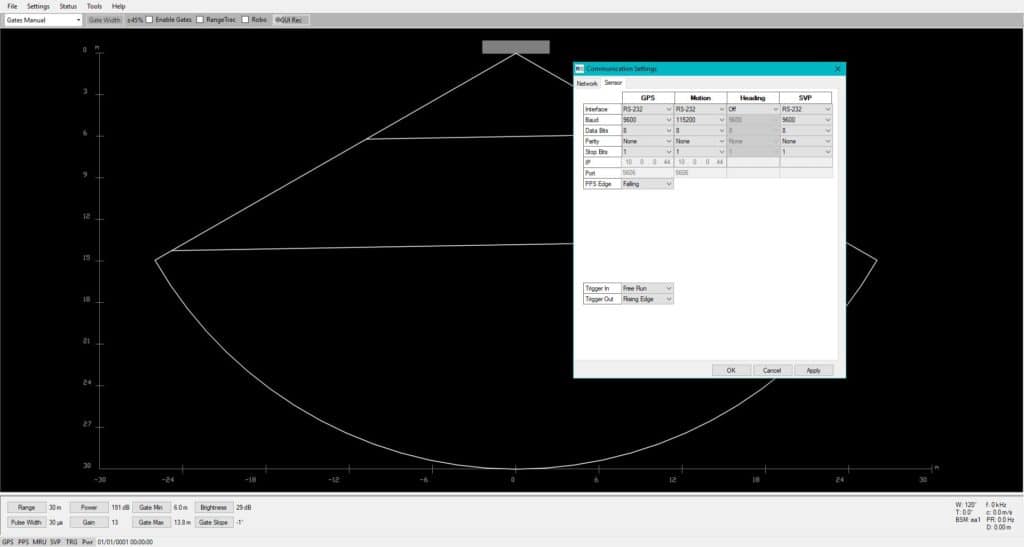
Sonic control Sensor Settings
Trigger In
The Trigger In options are Free Run (for standard operation), Rising Edge, Falling Edge, and Manual.
- The SIM Sync In input requires a TTL signal (0 to +5V)
- The minimum high-level trigger point is +2.4V
- The trigger pulse width must be longer than 1µsec
- The sonar will ping 10.025msecs (±10µsec) after receiving the trigger
- Manual mode allows the sonar to ping every time an external Ethernet command (PNG0, 1) is sent to the sonar head or in the GUI if, in FLS mode, the Ping button is used
Trigger Out
The Trigger Out options are Rising Edge or Falling Edge
- Output is 0 to +5V
- If Trigger Out is set to Rising Edge, the output pulse is high during the receive period
- If Trigger Out is set to Falling Edge, the output pulse is low during the receive period
In the lower portion of the GUI, the colour indicator will indicate when the Trigger In is active by changing from grey to green. ![]() When the Trigger In mode is set to Manual, the colour indicator will change to yellow.
When the Trigger In mode is set to Manual, the colour indicator will change to yellow. ![]()


